")
Automazione industriale
La parola "automazione" (nella forma inglese
automation) è stata coniata negli Stati Uniti nel 1948 per
designare alcuni procedimenti allora molto avanzati
introdotti (particolarmente nell'industria
automobilistica) e si è da allora largamente diffusa con
il significato di impiego di macchine per far andare altre
macchine. le macchine e gli impianti industriali per
essere utilizzabili debbono essere regolate (o
controllate, o automatizzate). Una nota casa produttrice
di pneumatici usa uno slogan che riassume bene
questo concetto:
"La potenza è nulla senza controllo"
Evoluzione Automazione industriale
Gli
uomini si sono sempre sforzati di
trasferire alcuni dei carichi del lavoro a
dispositivi meccanici: esempi di questi
meccanismi sono le carrucole, gli argani, i
sistemi di sollevamento, dei quali sono state
trovati dei reperti che datano al terzo
millennio AC.
Evoluzione Automazione
industriale
Durante la Rivoluzione Industriale nel XVIII
secolo furono sviluppate fabbriche che
producevano parti intercambiabili per prodotti
diversi, con la conseguente divisione delle
diverse lavorazioni ad operai, ad ognuno dei
quali veniva riservato un compito specifico che
veniva da questo eseguito un numero
imprecisato di volte. Da quel momento, fu
immediata l'esigenza di sviluppare macchine
(originariamente a vapore e successivamente
elettriche) che eseguissero questi compiti.
Evoluzione Automazione industriale
L'automazione
ha
assunto un ruolo
fondamentale con la
rivoluzione industriale
dell'ottocento con
l'introduzione dei telai
automatici, delle
macchine a vapore etc..
Uno dei primi esempi
di regolatore industriale
è il regolatore di Watt .
Automazione industriale
IL REGOLATORE DI WATT
Nel 1767 lo scozzese James
Watt,che era stato un
mediocre studente a scuola,
realizzò il primo motore
vapore rotativo della storia.I
motori vapore,fino ad allora
impiegati quasi
esclusivamente come pompe
nelle miniere,si poterono da
allora impiegare nelle
industrie,nella propulsione di
navi e treni,nell'agricoltura,
ecc,dando cosi` un enorme
nuovo impulso alla
rivoluzione industriale.
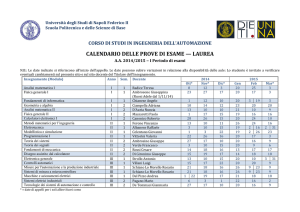
Automazione industriale
Fondamentale nel funzionamento del
motore di Watt fu un regolatore
automatico della velocità dell'albero
motore che sfruttava la forza centrifuga
basato sul principio della retroazione
(feedback ). Le palle del regolatore
erano collegate alla valvola di
immissione del vapore. Quando la
velocità dell'albero superava quella
desiderata, la forza centrifuga
allontanava le palle dall'albero,
tendendo a chiudere la valvola. Se la
velocità scendeva sotto quella
desiderata, le palle si avvicinavano
all'albero aprendo di più la valvola. Era
nato il primo dispositivo di controllo
automatico industriale della storia.
Il “RE” della Rivoluzione industriale:
il vapore
Utilizzo come forza motrice
-Motori industria manifatturiera
-Motori industria pesante
Utilizzo per il trasporto
-Motori per ferrovie
-Motori per navigazione
Utilizzi diversi
-Riscaldamento
-Raffreddamento
Evoluzione Automazione industriale
PRIMA INDUSTRIALIZZAZIONE INGLESE
SISTEMA RIGIDO DISTRIBUZIONE POTENZA
(esempio: un unico asse centrale mosso da un motore a
vapore , tramite pulegge e cinghie di cuoio trasmette
ilmovimento alle singole macchine )
QUESTO SISTEMA CONDIZIONO’ SIA LA STRUTTURA
ARCHITETTONICA DELLE FABBRICHE DELL’EPOCA
SIA L’ORGANIZZAZIONE DEL LAVORO
Evoluzione Automazione industriale
Questo sistema rigido è superato con la
INTRODUZIONE ELETTRICITA’
Per ogni macchina operatrice 1 o più motori
elettrici
Rete flessibile di cavi al posto delle barre a cinghie
Controllo del movimento di ogni motore tramite
interruttori controllo dell’avvio e arresto motore
Evoluzione Automazione industriale
Per rendere automatica una sequenza di comandi
LOGICA CABLATA
ESEMPIO : all’avviamento del motore
contemporaneamente si comandano altre funzioni
che , al loro termine , possono anche spegnere il
motore
LOGICA CABLATA
=
Insieme di apparecchiature che governano una
macchina o un insieme di macchine
Di tipo ELETTROMECCANICO
( relè , temporizzatori , contatori )
o
Di tipo ELETTRONICO
( reti logiche combinatorie )
L’innovazione è nella separazione tra
Circuito di potenza
e
Alta potenza x far muovere i motori
Circuito di controllo
a bassa potenza
LOGICA CABLATA :
LOGICHE ELETTROMECCANICHE
Si basano sul relè , sul temporizzatore ( per generare
ritardi ) , sul tamburo (= dispositivo dotato di un certo
n° di contati su un tamburo rotante . L’avanzamento
del tamburo fa sì che alcuni contatti vengano chiusi
attivando determinate azioni della macchina , che ,
completate , determinano l’avanzamento del tamburo
al passo successivo , come ad es. il timer della
lavatrice )
LOGICA CABLATA
LOGICHE statiche ( di tipo elettronico)
Reti combinatorie e sequenziali esplicano le funzioni di
controllo su una macchina.
Limite notevole non essendo disponibili strumenti di
simulazione , la messa a punto , collaudo e modifiche
sono eseguite sul circuito reale con conseguente
arresto dell’impianto
LOGICHE PROGRAMMABILI
Nel sistema CABLATO occorrono componenti diversi per ogni
funzione richiesta ( porte logiche , contatori , temporizzatori ,
memorie , ..)
Nel sistema programmabile ci sono elementi di ingresso e
uscita , mentre tute le altre funzioni sono realizzate da una
UNITA’ CENTRALE
COLLAUDI E MODIFICHE NON RICHIEDONO INTERVENTI
SUL CABLAGGIO
AUTOMAZIONE INDUSTRIALE
Nell’industria , dove si hanno operazioni che si ripetono
ciclicamente senza cambiare , per ottimizzare la produzione si
ha l’esigenza di automatizzare , ottenendo così anche minori
costi di produzione .
Esempi settori di applicazione
•Industria( chimica , alimentare,tessile ,automobilistica,..)
•Macchine utensili
•Robotica
•Acciaierie
•cementifici
Parti che compongono una AUTOMAZIONE
Parte operativa
Azionamento
Parte di comando
Rilevamento
Comando
Elaborazione
Dialogo
Parti che compongono una AUTOMAZIONE
Parte operativa
Comprende la macchina in tutte le sue componenti
Azionamento
Cilindri , motori , servomotori
Parti che compongono una AUTOMAZIONE
Parte di comando
Rilevamento
Elaborazione
Comando
Dialogo
Interruttori di prossimità , trasduttori,..
Microprocessori , PLC , computer , …
Relè di potenza, contattori
Consolle di programmazione , pulsanti , selettori
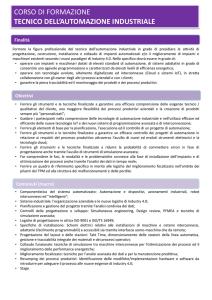
PLC
MEMORIA
B
U
S
CPU
INGRESSI
USCITE
I
M
P
I
A
N
T
O
Componenti del PLC : CPU
Stato ingressi
Istruzione1
Istruzione2
Istruzione3
Istruzione
Istruzione
Istruzione
La CPU ( central Processing Unit
•Legge lo stato dei segnali di ingresso
•Esegue le istruzioni registrate in
memoria
•Aggiorna lo stato delle uscite, in base
ai risultati logici dell’elaborazione
Istruzione
Istruzione n-1
Istruzione n
Stato uscite
Il BUS che permette lo scambio di
informazioni tra le sezioni di I/O
possono essere da 4,8,16,32 bit
Componenti del PLC : memoria
Suddivisa in diverse zone , ciascuna adibita a compiti differenti :
•Memoria per il programma utente
contiene le istruzioni che costituiscono il programma , lette dalla
CPU in maniera sequenziale. Di tipo Ram : essendo una memoria
volatile , è prevista una batteria al litio in caso di mancanza
improvvisa di tensione
•Memoria per le funzioni interne
Di tipo Ram , con batteria tampone , contiene i dati necessari
all’elaborazione logica e i risultati intermedi di operazioni
logiche
•Memoria per lo stato degli ingressi e delle uscite
Ha una collocazione di tipo statico, cioè i dati di I/O sono registrati
sempre negli stessi indirizzi
Componenti del PLC : memoria
Memoria per il software di sistema ( sistema
operativo )
È una memoria non volatile di tipo ROM ( o EPROM ) ,
nella quale è memorizzato il sistema operativo
Funzioni principali del Sistema Operativo
DIAGNOSTICA del sistema , come segnalazione guasti
CONTROLLO della scansione e durata del programma utente
CARICAMENTO dei programmi applicativi da dispositivi esterni
al controllore
PILOTAGGIO di eventuali periferiche collegate al PLC con
interfacce di comunicazione
SEZIONI DI I/O
Definiscono la capacità del PLC ( da 0 a 128 I/O piccoli ;
da 129 a 512 I/O medi ; da 513 a 1024 I/O grandi )
Devono essere compatibili con segnali che vanno da 5 V DC a 220 V
AC , dai segnali digitali a quelli analogici
UNITA’ DI I/O ANALOGICHE usano convertitori A/D per gli ingressi e D/A per
le uscite e sono impiegate per funzioni di regolazione molto semplici( regolazione
di livello , di temperatura , di n° di giri , etc..)
UNITA’ DI INGRESSO DIGITALI converte i segnali binari di ON /OFF del
processo da controllare al livello dei segnali interni TTL a 5 Volt . Si differiscono
per densità ( 8, 16,32 ingressi per modulo) e per livelli di tensione ( 5, 24, 48VDC ;
48, 110, 220 VAC )
UNITA’ DI USCITA DIGITALI converte i segnali interni del PLC al livello
richiesto dagli attuatori .Si differiscono per densità ( 4,8, 16,32 punti di uscita) .
Correnti di uscita che ogni singolo punto può fornire 0,1 A; 0,5A ; 1A ; 2A
CONFRONTO TRA PC E PLC
PLC
PC
La velocità di elaborazione e di risposta
caratterizzano la potenza del PLC
Ha hardware e software troppo lenti per
elaborare informazioni in tempi reali
Adatto ad ambienti industriali , con fattori
inquinanti , sbalzi di temperatura , urti
meccanici , disturbi elettromagnetici
Adatto ad ambienti di ufficio
Si interfaccia con sensori ed attuatori che
forniscono e richiedono segnali elettrici
necessita di hardware particolare
Interagisce con l’uomo le periferiche di
I/O sono video , tastiera , stampanti , ..
Dispone di linguaggi di più facile
Usa linguaggi di programmazione
interpretazione , anche se si sono sviluppati complessi
linguaggi più complessi
Rare istruzioni di salto o interruzioni ( il
PLC ha il solo compito di eseguire un
programma in un dato tempo , di ripeterlo
ciclicamente senza interruzioni tranne per
allarmi )
Vi sono vari Interrupt
")