Giorgio Porcu
Appunti di
SISTEMI
ITI Elettronica
Classe QUINTA
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
1. TEORIA DEI SISTEMI
SISTEMA
Collezione di elementi che interagiscono per realizzare un obiettivo.
Il termine è applicabile in senso lato per descrivere interazioni di elementi naturali (ES:
Vene e Arterie nel Sistema Circolatorio) o artificiali (ES: Resistenze e Condensatori in un
Sistema Elettrico).
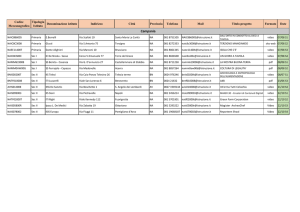
Un sistema è caratterizzato da:
1. Un’insieme I di segnali in entrata o input
2. Un’insieme O di segnali in uscita o output
3. Un insieme di variabili interne, i cui valori determinano lo Stato S del sistema
4. Un insieme P di parametri o grandezze fisiche che agiscono sul sistema
I
SISTEMA
O
S
P
CLASSIFICAZIONE DEI SISTEMI
I sistemi sono classificati in base a caratteristiche degli elementi che li compongono o
del sistema nel complesso. Riferendoci alle più importanti, possiamo distinguere tra:
• Sistema Naturale: costituito da elementi naturali
• Sistema Artificiale: costituito da elementi o dispositivi artificiali, progettati e
realizzati dall’uomo
• Sistema Continuo o Analogico: utilizza grandezze continue (infiniti valori)
• Sistema Discreto o Digitale: utilizza grandezze discrete (numero finito di valori)
• Sistema Deterministico: il suo comportamento nel tempo è determinabile con
esattezza con legge matematica
• Sistema Probabilistico: il suo comportamento nel tempo è stimabile con funzioni di
probabilità ma non determinabile con certezza
• Sistema Statico: l’uscita è funzione delle sole entrate; lo Stato S non muta nel tempo
• Sistema Dinamico: l’uscita è funzione delle entrate e dello Stato S e dipende quindi
dalla storia passata del Sistema. Il Sistema si evolve nel tempo (passa da uno Stato a
un altro).
ESEMPI DI SISTEMI
> Elaboratore Elettronico: sistema artificiale, digitale, deterministico, dinamico
> Sistema circolatorio: sistema naturale, dinamico
> Circuito RL: sistema artificiale, deterministico
> Sistema climatico: sistema naturale, probabilistico
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
1.1
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
MODELLO
Rappresentazione schematica e semplificata di un sistema. Consente di analizzarlo
focalizzandosi sulle sole caratteristiche di reale interesse. Può essere di tipo grafico,
analogo, simbolico.
Due sono i modelli fondamentali: lo schema a blocchi e il modello matematico.
SCHEMA A BLOCCHI
Modello grafico del funzionamento logico di un sistema.
Utilizza due simboli di base:
• Un rettangolo o blocco per rappresentare un sistema o un dispositivo/elemento
• Una freccia direzionale per indicare un segnale o insieme di segnali
In questa rappresentazione un sistema o un singolo elemento che lo compone assume la
forma di un blocco con freccia in entrata (input) e in uscita (output):
I
O
SISTEMA
(DISPOSITIVO, ELEMENTO)
Combinando i blocchi è possibile rappresentare interazioni di dispositivi o interi sistemi.
Allo scopo si utilizzano due ulteriori simboli:
• Un cerchietto pieno per indicare un nodo deviatore
• Un cerchio vuoto per rappresentare un nodo sommatore
Tipici esempi di interazioni sono i sistemi in serie e in parallelo:
i
i1
SISTEMA 1
o1=i2
o2
SISTEMA 2
SISTEMA A
oA
i
i
SISTEMA B
oB
I nodi sommatori consentono la somma algebrica di input e output per costruire sistemi
più complessi, come i sistemi a retroazione:
i
s
oB
SISTEMA A
SISTEMA B
oA
oA
iB
ESEMPI DI SCHEMI A BLOCCHI
> CATENA DI ACQUISIZIONE DATI
Una catena di acquisizione dati è un insieme di dispositivi elettronici in serie che acquisiscono
segnali analogici per trasformarli in digitali. E’ rappresentata dal seguente schema a blocchi:
I
TRASDUTTORE
CIRCUITI DI
CONDIZIONAMENTO
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
SAMPLE AND
HOLD
ADC
O
1.2
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
MODELLO MATEMATICO
Legge matematica che descrive il comportamento del Sistema.
Nella forma tipica (modello matetematico nel dominio del tempo) è un’equazione in ℝ
nella variabile t, indicata col simbolo f(t).
In termini pratici, esprime come l’output O del Sistema varia nel tempo t in funzione
dell’input I, dello stato S e dei parametri P:
I(t)
MODELLO MATEMATICO
SISTEMA
descrive
O(t)
S
f(t)
P
Il modello dipende dalle caratteristiche costruttive del sistema, ovvero dai componenti
utilizzati, dalle leggi fisiche che li governano e dai segnali di input.
A Pagina 1.4 sono elencati i principali componenti elementari utilizzati nei sistemi.
Per ciascuno è riportata la legge matematica f(t) che lo descrive
A Pagina 1.5 sono elencati i segnali canonici di input
Il modello matematico è di norma semplificato rispetto al comportamento reale. In esso
sono trascurate le caratteristiche (variabili, parametri, Stato) ritenute non importanti e
approssimate quelle di difficile schematizzazione.
ESEMPI DI MODELLI MATEMATICI NEL TEMPO
> CONDENSATORE IN CORRENTE CONTINUA
Consideriamo il sistema costituito da un condensatore C che utilizzi una corrente continua
fornita da un generatore I.
Cerchiamo il modello matematico che esprime la tensione v(t) sulle armature di C.
i(t)
I
C
I
I
C
O
Possiamo immaginare il generatore come l’input del sistema e il condensatore come l’unico
suo componente. L’output sarà la tensione (ddp) generata sulle armature.
Il valore dell’output è dato dalla legge di funzionamento del condensatore:
v(t) =
1
C
⋅
t
∫ i(t)
0
Il valore dell’input è la corrente continua (segnale a gradino E) prodotta dal generatore:
i(t) = E
Combinando input e output in una sola espressione troviamo il modello matematico:
v(t) =
1
C
t
∫
⋅ E
0
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
1.3
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
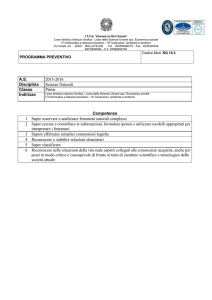
COMPONENTI ELEMENTARI
Componenti fisici di base (elettrici, termici, idraulici) costituenti le parti elementari di un
sistema. Ciascuno è caratterizzato da un proprio modello matematico f(t), legato alle leggi
fisiche che lo governano. I principali componenti sono indicati nella seguente tabella:
Tipo
Grafico
ELETTRICI
R
L
f(t)
Denominazione
v(t) = R ⋅ i(t)
Resistore R
Resistenza elettrica
v(t) = L ⋅ iI (t)
Induttore L
Induttanza elettrica
1 t
⋅ i(t)
C ∫0
i(t) = C ⋅ vI (t)
Condensatore C
Capacità elettrica
v(t) =
C
Φ(t) =
TERMICI
Φ(t)
RT
Φ(t)
CT
IDRAULICI
Q(t)
RL
T(t)
RT
Φ(t) = C T ⋅ T I (t)
Q(t) =
p(t)
RL
Resistenza termica
Capacità termica
Resistenza idraulica
Q(t)
CL
Q(t) = CL ⋅ pI (t)
Capacità idraulica
La tabella è tratta da: De Santis, Cacciaglia, Saggese - “Sistemi 1”, ISBN: 978-88-528-0223-2
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
1.4
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
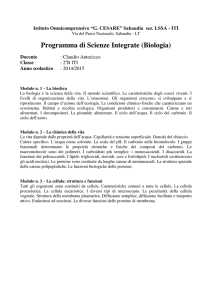
SEGNALI CANONICI
Segnali tipici utilizzati come input di un sistema per valutarne il comportamento. Sono
riassunti nella seguente tabella:
Grafico
f(t)
Denominazione
f(t) = δ(t)
Delta di Dirac
1, t ≥ 0
f(t) =
0, t < 0
Gradino
unitario
E, t ≥ 0
f(t) =
0, t < 0
Gradino
di ampiezza E
f(t)
t
f(t)
1
t
f(t)
E
t
f(t)
t, t ≥ 0
f(t) =
0, t < 0
Rampa
unitaria
t
f(t)
k ⋅ t, t ≥ 0
f(t) =
t<0
0,
Rampa
di coefficiente angolare k
t
f(t)
t2 , t ≥ 0
f(t) =
0,
t<0
Parabola
unitaria
t
f(t)
sin(ωt), t ≥ 0
t
f(t) =
t
f(t) =
0,
t<0
Sinusoide
f(t)
cos(ωt), t ≥ 0
0,
t<0
Cosinusoide
La tabella è tratta da: De Santis, Cacciaglia, Saggese - “Sistemi 1”, ISBN: 978-88-528-0223-2
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
1.5
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
COMPORTAMENTO DI UN SISTEMA
Il comportamento è determinato dalla variazione dell’output (detta reazione o risposta)
nel tempo in conseguenza dell’input (impulso o sollecitazione). Può essere influenzato
dallo Stato e dai Parametri. E’ analizzabile mediante il modello matematico.
impulso
sollecitazione
I(t)
SISTEMA
S
reazione
risposta
O(t)
P
SOLLECITAZIONE
Segnale di input impiegato per testare o stabilire il comportamento del sistema. Di norma
è un segnale elettrico, digitale o analogico.
Pagina 1.5: Segnali canonici di input
RISPOSTA
Variazione nel tempo dell’output del sistema conseguente a una specifica sollecitazione.
Dipende dal modello matematico del sistema in esame.
Pagina 1.6: Componenti elementari
TIPOLOGIE DI RISPOSTA
La risposta totale (o semplicemente risposta) è la somma di due componenti:
• Una risposta libera, causata dallo stato iniziale del sistema.
• Una risposta forzata, dovuta ai soli impulsi esterni (input).
In termini matematici:
O(t) = RTotale = RLibera + RForzata
RISPOSTA LIBERA
E’ ottenuta imponendo il segnale d’ingresso nullo.
Si manifesta solo se il sistema ha energia immagazzinata nello stato iniziale a causa
della sua struttura interna (presenza di elementi accumulatori di energia quali
condensatori o induttori).
RISPOSTA FORZATA
Si ottiene ipotizzando una risposta libera nulla, ovvero una situazione iniziale statica.
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
1.6
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
PROPRIETÀ DI UN SISTEMA
Classifichiamo un sistema sulla base del comportamento introducendo alcune proprietà:
LINEARITÀ
Un sistema è lineare se soddisfa il principio di sovrapposizione degli effetti. In termini
pratici, ciò avviene quando:
• La risposta a un insieme di sollecitazioni è la somma algebrica delle risposte ottenibili
applicando separatamente ciascuna di essa
• La risposta varia linearmente con l’ingresso
Un sistema è invece non lineare se non soddisfa tali principi.
PRINCIPIO DI SOVRAPPOSIZIONE DEGLI EFFETTI
La risposta prodotta su un sistema dalla combinazione lineare di n sollecitazioni
indipendenti è la sovrapposizione delle n risposte ottenibili se ciascuna
sollecitazione agisse da sola
INVARIANZA NEL TEMPO (STAZIONARIETÀ)
Un sistema è Tempo Invariante (o Stazionario) se i parametri P non variano, ma
conservano le proprie caratteristiche nel tempo. In termini pratici, P è una costante nel
modello matematico.
Viceversa, un sistema si dice Tempo Variante quando i parametri P si modificano in
funzione del tempo.
ESEMPI DI LINEARITÀ E STAZIONARIETÀ
> Amplificatore Operazionale a catena chiusa: sistema artificiale lineare
> Circuito elettrico con componenti non dinamici: sistema artificiale stazionario
SISTEMI LINEARI TEMPO INVARIANTI
In relazione al comportamento chiameremo Sistemi Lineari Tempo Invarianti (o Sistemi
LTI) i sistemi che soddisfano entrambe le proprietà descritte in precedenza:
• Linearità (vale il principio di sovrapposizione degli effetti)
• Stazionarietà (i parametri P sono costanti nel tempo)
I sistemi LTI sono i più utilizzati per lo studio pratico nella materia Sistemi.
MODELLO MATEMATICO NEL TEMPO DI UN SISTEMA LTI
Poiché in un sistema LTI la risposta varia linearmente con l’ingresso, il modello f(t) è
sempre esprimibile come rapporto tra output e input nel tempo:
O(t)
f(t) =
I(t)
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
I(t)
SISTEMA LTI
O(t)
P costanti
1.7
C1 Revisione: 07/03/2011
Appunti di SISTEMI
ITI Elettronica - Classe QUINTA
ANALISI DI UN SISTEMA
Lo studio del comportamento di un Sistema è detto Analisi. E’ eseguita sulla base del
modello matematico con opportuni strumenti di calcolo. Può essere condotta a vari livelli;
in questo corso ci occuperemo di:
• Analisi nel dominio del tempo
• Analisi nel dominio della frequenza (o analisi armonica)
Capitoli 4, 5: Analisi dei Sistemi
ANALISI NEL DOMINIO DEL TEMPO
Studio della risposta del Sistema al variare del tempo.
Si concretizza nella stesura e/o nello studio di un diagramma tensione-tempo che
esprima graficamente come si evolve l’output (in genere una tensione vo) nel tempo t.
vo
t
DIAGRAMMA TENSIONE-TEMPO
ANALISI NEL DOMINIO DELLA FREQUENZA
Studio della risposta del Sistema al variare della frequenza.
E’ importante per tutti i sistemi sottoposti a un segnale sinusoidale (AC).
Secondo il teorema di Fourier tale segnale è scomponibile in una serie di armoniche a
differenti frequenze f (o differenti pulsazioni ω). Per analizzare il sistema si verifica la
risposta di ciascuna di esse (Risposta in frequenza) e non solo l’output nel complesso.
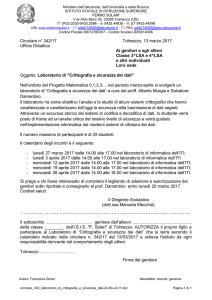
Utilizza due tipologie di diagrammi:
o DIAGRAMMA DI BODE: rappresenta la risposta in frequenza del sistema su un piano
reale con scala semilogaritmica. E’ suddiviso in due sottografici: il diagramma della
Risposta in ampiezza e quello della Risposta in fase.
o DIAGRAMMA DI NYQUIST: rappresenta la risposta in frequenza su un piano complesso
(polare) utilizzando assieme i valori di modulo e fase.
A
θ
θ
Im
Re
f
ω
RISPOSTA IN AMPIEZZA
f
ω
RISPOSTA IN FASE
DIAGRAMMA DI BODE
3.4.5 ITI ELETEL 3.4.5 ITI ELTAUT 3.4.5 ITI INF
ρ
DIAGRAMMA POLARE
DIAGRAMMA DI NYQUIST
1.8