DICo – Dipartimento di Informatica e Comunicazione
Università degli Studi di Milano
DSP Application Day 2006
Milano - September 18, 2006
Impiego di sistemi operativi e kernel real-time sui DSP di nuova
generazione
Umberto Zanghieri - ZP Engineering srl
Abstract: I nuovi prodotti richiedono integrazioni sempre più spinte. Una tendenza recente nel moderno
sviluppo di applicazioni su DSP prevede l'impiego di un sistema operativo sullo stesso processore, per
applicazioni con funzioni di controllo sofisticate, oppure l'utilizzo di un kernel real-time per gestire più task.
Vengono illustrate alcune delle problematiche da affrontare nello sviluppo su DSP con sistema operativo
uClinux, e una comparazione di vantaggi e svantaggi dell'utilizzo di kernel real-time su processori ad alte
prestazioni.
1. Premessa
Nel passato, i DSP sono stati impiegati in numerosi sistemi, tra cui schede audio, modem,
dispositivi di telecomunicazione, apparati medicali, tutte basate su applicazioni di puro processing
di segnale. I sistemi DSP erano in genere progettati specificatamente per le applicazioni previste,
e disponevano solo delle funzionalità necessarie per rispettare i constraints di costo e prestazioni.
Le funzionalità tipiche di un sistema operativo (comunicazione, gestione di memorie di massa,
grafica, etc...) erano generalmente fornite da un processore che gestiva uno o più DSP.
Con la rapida adozione di nuove architetture con funzionalità multimediali e di comunicazione, c’è
ora mercato per un nuovo tipo di DSP. In precedenza, l’architettura più comune era un
processore general-purpose che controllava un DSP con funzioni di coprocessore. Tale scelta
progettuale non è ottimale dal punto di vista del costo, manutenibilità, potenza assorbita e
dimensioni; in compenso, le varie funzioni possono in alcuni casi essere sviluppate
indipendentemente.
2. Impiego di Linux su dispositivi embedded
Anche se originariamente Linux non è nato per dispositivi embedded, è oggi disponibile su una
notevole varietà di prodotti embedded. A partire dal rilascio del kernel in versione 2.0.x, e la
comparsa di servizi di supporto per Linux su processori embedded (ARM7, ARM9, Freescale,
MIPS, PowerPC, XScale), c’è stata una vera e propria esplosione di prodotti commerciali basati
su Embedded Linux; nella maggior parte dei casi, la presenza di Linux a bordo di un dispositivo è
non evidente agli occhi degli utenti di tali apparati. Ad oggi, la maggioranza dei router a banda
larga, dei firewalls, dei punti di accesso e persino di alcuni lettori DVD impiegano Linux.
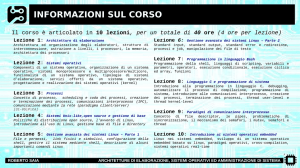
Linux è nato agli inizi degli anni 90 ad opera di uno studente finlandese, Linus Torvalds; si è
basato sulla disponibilità del compilatore C GNU sviluppato dalla Free Software Foundation, a
partire dal 1984. Le versioni più rilevanti sono le seguenti:
Linux 1.0
Linux 2.0
uClinux
Linux 2.4
Linux 2.6
1994
1996
1998
2001
2004
2
Linux è nato originariamente per
processori
x86,
e
prevede
l’impiego di una MMU (memory
management unit). A partire dal
1998 si iniziò a sviluppare una
variante per proecssori privi di
MMU e come tali più simili ai
classici microcontrollori, da cui il
nome uClinux. Ad oggi, uClinux ha
avuto una enorme diffusione in
ambito embedded, nonstante sia
nato come versione autonoma e
con un abase di sviluppatori meno
ampia del kernel Linux.
Linux
e uClinux offrono una
notevole varietà di driver per ogni
sorta di protocollo e hardware.
Considerando inoltre, che questi
sistemi operativi non richiedono
royalties runtime, la loro diffusione
in ambito embedded risulta più che
giustificata.
3. Perchè un sistema operativo open source su DSP?
Le richieste di funzionalità sempre più sofisticate, soprattuto dal punto di vista dei protocolli di
comunicazione, e l’esigenza di minimizzare i costi in produzione hanno favorito l’adozione di
Linux e uClinux sulle piattaforme più disparate.
Nei casi in cui sia necessario disporre della potenza di un core DSP, la tendenza più recente è
quella di progettare un processore con funzionalità miste RISC e DSP, in modo da favorire
l’adattamento di un kernel di sistema operativo originariamente previsto per microcontrollori e
processori tradizionali.
La Analog Devices ha progettato in collaborazione con la Intel una nuova architettura [1] detta
MSA (Micro Signal Architecture) che offre numerose istruzioni tipiche di un processore generalpurpose, rendendo possibile l’adattamento di un sistema operativo come uClinux. Nella
architettura esiste una MMU ma è di tipo non compatibile con le necessità del kernel Linux, per
cui è stato effettuato il port del kernel uClinux (inizialmente 2.4, ora 2.6).
La famiglia Blackfin è uno dei processori
basati sulla architettura MSA disponibili come
prodotti off-the-shelf. Come ulteriore prova
della natura ibrida dell’architettura MSA, alle
varianti general-purpose di Blackfin (BF-531,
532 e 533 che si differenziamo per la
quantità di memoria interna) sono state
affiancate varianti con un Ethernet controller
integrato, ed una interfaccia CAN.
E’ evidente l’intento dei fabbricanti di semiconduttori di favorire la convergenza su un unico
processore di funzionalità di controllo e comunicazione con le esigenze di processing.
3
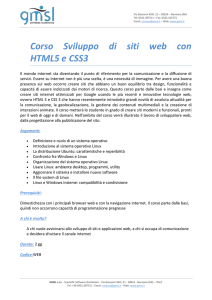
L’adozione di un sistema operativo open-source su DSP è un trend in significativa evoluzione che
compete in alcuni casi con processori ormai storici (Coldfire, SH).
Linux/uClinux su processori embedded: trends di impiego
Source: Embedded Linux Market Survey 2006, Linuxdevices
Gli aspetti più salienti nella architettura Blackfin che rendono fattibile e utilizzabile un port uClinux
sono i seguenti:
Presenza di blocchi di SRAM interna impostabile come cache istruzioni e cache dati; in
questo modo, non si è legati al collo di bottiglia dell’accesso a memoria esterna
(generlamente 4-5 volte più lento dell ammeoria interna)
set di istruzioni RISC-like
supporto SDRAM, indispensabile per consentire l’impiego dei 16Mbytes minimi richiesti
da un sistema operativo come uClinux
disponibilità di numerosi canali DMA che consentono di rilassare le specifiche di risposta
agli interrupts mediante buffering
4. Differenze tra Linux e uClinux
Linux è derivato essenzialmente da UNIX, e consiste in un sistema operativo multi-utente e multitasking, in cui il kernel deve prendere particoalri precauzioni per assicurare il corretto e sicuro
funzionamento di numerosi processi, fino a qualche migliaio sullo stesso sistema. Il modello
UNUX protegge ogni processo in uno spazio di memoria dedicato. Inoltre, un sistema di memoria
virtuale deve offrire meccanismi di allocazione dinamica della memoria e il mapping di regioni
arbitrarie di memoria all’interno delle zone di memoria private dei singoli processi.
Alcuni processori, come il Blackfin, non offrono una MMU completa, in quanto gli sviluppatori che
intendono sviluppare le loro applicazioni senza utilizzare un sistema operativo generalmente non
hanno bisogno di una MMU; inoltre, l’assenza di una MMU completa consente ulteriori
ottimizzazioni di costo e consumo di potenza.
Su questi presupporti, alcuni compromessi sono stati definiti nello sviluppo di uClinux, tra cui:
assenza di un vero sistema di memoria protetta
assenza della chiamata di sistema fork()
disponibilità solo di semplici sistemi di allocazione della memoria
Per quanto riguarda la protezione della memoria, uClinux non fa impiego di memoria virtuale. I
processi uClinux non possono aumentare la memoria disponibile a run-time; ogni processo può
accedere qualunque parte della memoria, e quindi potenzialmente causare un crash di altri
4
processi o dello stesso sistema operativo. Non è previsto l’impiego di memoria di swap (anche se
generalmente i sistemi con uClinux non dispongono di un hard disk).
Il secondo punto è più problematico; in Linux, la chiamata fork() crea una copia esatta del
processo di partenza e lo esegue simultaneamente, facendo esplicito impiego della MMU;
uClinux offre una versione modificata di fork() detta vfork(), in cui il processo originante è bloccato
durante l’esecuzione del processo derivato. Quindi, il software che utilizza fork() deve essere
riscritto per fare impiego di vfork(). Vengono supportati i threads in quanto fanno impiego dello
stesso spazio di memoria. Inoltre, uClinux supporta su alcune piattaforme XIP (execution-inplace), consentendo l’esecuzione direttamente da ROM.
La gran parte delle applicazioni disponibili per Linux possono essere facilmente ricompilate per
uClinux senza variazioni o con poche modifiche.
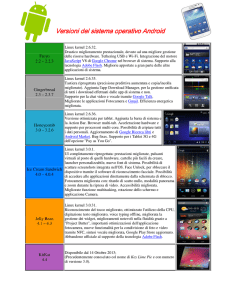
distribuzioni Linux per applicazioni in dispositivi embedded: trends di impiego
Source: Embedded Linux
Market Survey 2006,
Linuxdevices
Un altro aspetto non trascurabile è legato al
tempo di context switch nei due sistemi operativi,
soprattutto a causa della differente gestione di
memoria dei processi.
In un articolo del gruppo Samsung, è stato
analizzato il comprtamento di Linux e uClinux
sullo stesso processore (un ARM9). Il tempo per
commutare processo è risultato nel caso di
uClinux circa 5 volte inferiore rispetto a Linux.
Source: Samsung Tech Conference
5
5. Sviluppo su uClinux
Lo sviluppo su sistema operativo uClinux è piuttosto differente dallìapproccio tradizionale dello
sviluppatore DSP, basato di solito su un ambiente grafico integrato che consente di editare i
sorgenti, di creare progetti, di effettuare compilazione, linking e debug real-time senza cambiare
applciazione su host.
Nel caso di uClinux e Linux, la piattaforma preferenziale di sviluppo è un desktop Linux.
Prendendo come esempio il port di uClinux per Blackfin, l’ambiente di sviluppo consiste in:
GNU Compiler Collection (GCC cross compiler)
Binutils (likner, assembler, etc…) per Blackfin
In aggiunta, sono necessari ulteriori tools GNU come awk, sed, make, bash e Tcl/Tk, che
generalmente fanno parte delle tipiche distribuzioni Linux per desktop.
Le attività di sviluppo si possono suddividere nelle seguenti fasi:
adattamento del kernel e del BSP
caricamento iniziale sul target
sviluppo della applicazione
Gran parte delle attività iniziali consistono nel selezionare le opzioni di interesse per compilare il
kernel e il relativo BSP (board support package), e nel rimuovere tutte le funzionalità che
nonsono necessarie in modo da risparmiare spazio di memoria FLASH.
Configurazione grafica del kernel
La distribuzione uClinux offre un’ampia selezione di utilities e programmi sviluppati tenendo conto
delle problematiche primarie di dimensioni del codice e di efficienza (apsetti non sempre prioritari
su piattaforme host). Ad esempio, Busybox è un programma che può essere invocati con diversi
nomi e racchiude le funzionalità di numerosi applicativi a console tipici di una distribuzione Linux;
esso consente di ridurre significativamente le dimensioni dell’immagine binaria del kernel senza
rinunciare a numerose utilities.
Il target deve essere inzialmente caricato con il kernel, tipicamente con i tools standard del DSP
(VisualDSP++ nel caso del Blackfin). Il passo successivo è l’ulitizzo di un bootloader (un
applicativo più semplice che consente di aggiornare il firmware a board via seriale o LAN),
rendendo così non indispensabile la presenza di un emulatore JTAG.
Una volta che il kernel è caricato ed avviato, si può effettuare il debug mediante il classico GNU
debugger GDB, che impiega i canali di comunicazione standard (seriale o LAN).
6
In questo modo, si opera in maniera molto simile allo sviluppo su host, perdendo la visibilità tipica
di un simulatore o di emulatore JTAG
L’impiego di un breakpoint a basso livello risulta quasi inutilizzabile nei contesti pratici, perchè
blocca anche l’esecuzione del sistema operativo e quindi dei vari processi di comunicazione.
L’ultimo passo è relativo òllo sviluppo della applicazione specifica del dispositivo; spesso si fa
impiego di shell scripts o linguaggi interpretati come Perl o Phyton per dimnuire i tempi di
sviluppo. Dove è necessario lo sviluppo in C, la presenza dimoltissimi protocolli, servizi e device
drivers consente di focalizzarsi solo sulle porzioni specifiche del progetto.
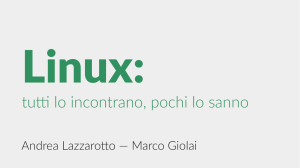
6. Esempio di design basato su uClinux
Per dare una veste più concreta a quanto detto sull’impiego di uClinux su piattaforma DSP, si
analizza un prodotto commerciale di successo progettato dalla Roku Labs. Il Roku Soundbridge è
un media player basato su singolo processore Blackfin, sul quale gira il sistema operativo uClinux
più una collezione di algoritmi sviluppati internamente alla Roku Labs per le operazioni di
decodifica e connessione ai vari tipi di server.
Formati audio supportati:
MP3
WMA
AAC
WAV, AIFF (lineare)
Protocolli supportati:
Roku Control Protocol
Bonjour™* and iTunes DAAP
UPnP AV
Windows Media DRM 10
WEP, AutoIP
DHCP,TCP,TELNET, HTTP
Un singolo processore svolge le seguenti funzioni:
funzioni da controllore
o protocollo TCP/IP
o protocolli di autenticazione e connettività
o digital rights management
o gestione di una interfaccia WiFi (su slot CompactFlash)
o gestione grafica su display
Gestione di una interfaccia Ethernet
Funzioni da DSP
o Compressed stream decoder
o Gestione I/O digitale (su alcuni modelli)
o Gestione uscite analogiche
In questo modo, è possibile minimizzare il BOM (bill of materials) a livelli non raggiungibili con la
tradizionale architettura RISC+DSP. Il sistema si basa su un BF531, la variante più economica
della serie Blackfin. Non è noto quale versione o variante di uClinux venga utilizzata.
7
Real-time kernels
Ci sono casi in cui l’impiego di un sistema operativo come uClinux non è la scelta più indicata,
soprattutto quando:
sono necessarie prestazioni hard-real-time che uClinux non può garantire
ci sono constraints significativi di memoria esterna (FLASH, SDRAM e/o SRAM)
l’applicazione non richiede particolari protocolli di comunicazione
Le problematiche classiche di sviluppo embedded sono oggi sempre più frequentemente
affrontate con l’impiego di kernel operativi real-time (detti anche RTOS, real-time operating
system); si tratta di sistemi di dimensioni molto contenute e prestazioni elevate.
Fino a qualche anno fa, l’utilizzo di RTOS in contesti embedded non era molto diffuso, soprattutto
a causa dell’overhead di processing che risultava significativo sui normali processori, che
avevano frequenze operative dai 20 ai 60 MHz. La situazione è notevolmente cambiata con la
disponibillità di processori di potenza più elevata, in cui l’overhead dovuto al RTOS viene motlo
contenuto, ed alla necessità di reagire con rapidità a variazioni di hardware e specifiche.
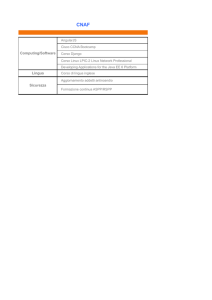
Come esempio viene illustrata la disponibilitò di sistemi operativi per la piattaforma Blackfin:
OS/Kernel
Nucleus PLUS
VDK kernel
INTEGRITY & velocity RTOS
RTXC RTOS
Fusion RTOS
uClinux
Vendor
Accelerated Technology
Analog Devices
Green Hills Software
Quadros Systems
Unicoi Systems
Open source community
Prendendo in esame il VDK (VisualDSP Kernel), un real-time kernel che fa parte dell’ambiente di
sviluppo della Analog Devices, si possono notare i seguenti aspetti interssanti:
supporto per numerose varianti di processori anche su famiglie diffeenti (floating-point e
TigerSHARC), vedi tabella
integrazione delle funzionalità di instrumentazione all’interno dell’ambiente di debug
gestione multi-thread, con varie politiche di gestione dei threads
impiego dei device drivers per astrarre dalle risorse hardware specifiche della variante
utilizzata
Processori
SHARC
Processori
BLACKFIN
Processori
TigerSHARC
ADSP-21060/21061/21062/21065L
ADSP-BF531/2/3
ADSP-TS101
ADSP-21160/21161
ADSP-BF534/6/7/8/9
ADSP-TS201/2/3
ADSP-21261/2/6/7
ADSP-BF535
ADSP-21363/4/5/6/7/8/9
ADSP-BF561, AD6532, ADSP-BF566
Processori supportati dal VDK
Gli obbiettivi che si prefigge il VDK sono i seguenti:
evitare di sviluppare codice troppo specifico per il processore impiegato, in modo da
favorire la riutilizzabilità del lavoro e l’adattamento a processori più moderni
consentire l’integrazione di porzioni di codice scritte da persone o gruppi di lavoro diversi
Alcune delle caratteristiche più interessanti del VDK sono:
disponibilità di tre differenti versioni delle librerie VDK: semplici, con error checking, con
intrumentation. Nella versione instrumented, il kernel mantiene informazioni di tipo
8
statistico e un log di tutti gli eventi significativi in un history buffer. Questo buffer può
essere analizzato ad esecuzione bloccata, e rappresenta un tool molto potente per il
debug (specie post-mortem)
le funzionalità vanno sviluppate sotto forma di threads, un set di funzioni che
implementano la funzione richiesta; il thread viene eseguito in modo ciclico o solo se
invocato. Ogni thread dispone di un proprio stack, di uno sttao, una priorità ed altre
variabii locali.
Ogni thread richiede la creazione di 5 funzioni: Run, Error, Init, Create, Destruct ; le prime
due sono obbligatorie, le altre sono opzionali e tipicamente fanno riferimento all’impiego
di buffers di memoria da allocare e liberare
Lo scheduler è un processo fondamentale del VDK, che gestisce i vari thread in base alle
priorità ed alle metodologie di scheduling impostate
Sono disponibili fino a 30 livelli di priorità, ed ogni thread può modificare dinamicamente
la propria priorità
La gestione dei thread e delle priorità è gestita dai segnali: semafori, eventi, device flags
o messaggi
È possibile disabilitare lo scheduler per porzioni di codice critiche, e se necessario anche
gli interrupts
Se si opera in modo instrumented, è possibile trarre vantaggio di analisi post-mortem del carico
(effettuato misurando essenzialmente il tempo in cui è attivato il thread IDLE) e del passaggiodi
stato tra threads.
Il VDK opera sempre come un kernel preemptive, in cui lo scheduling può essere impostato sui
vari threads in tre differenti modalità:
cooperative
round-robin
preemptive
Lo scheduling cooperative è la modalità più semplice, in cui ogni thread opera allo stesso livello
di priorità e viene eseguito fino a quando non restituisce manualmente il controllo allo scheduler
stesso.
Lo scheduling in round-robin opera in time slicing, in cui i threads allo stesso livello di priorità
vegono abilitati per un periodo prefissato di tempo. Non ci sono garanzie sul tempo esatto di
esecuzione, per cui è inevitabilmente presente un jitter nel tempo di attivazione di un thread.
Lo scheduling preemptive prevede che un thread a priorità maggiore di quello in esecuzione
venga eseguito senza attendere altri eventi o segnali.
Tipicamente, i processi non ciritici dal punto di vista del real-time possonon essere impostati in
round-robin alla stessa priorità, mentre quelli time-critical vengono gestiti a priorità più alta.
9
References
[1] R. K. Kolagotla, J. Fridman, M. M. Hoffman, W. C. Anderson, B. C. Aldrich, D. B. Witt, M.
S. Allen, R. R. Dunton,, L. A. Booth Jr. “A 333-MHz dual-MAC DSP Architecture for NextGeneration Wireless Applications”, ICASSP 2001
[2] M. Durrant, J. Dionne and M. Leslie “Running Linux on a DSP? Exploiting the
Computational Resources of a programmable DSP Micro-Processor with uClinux”,
Ottawa Linux Sumposium, June 2002
[3] “World's first native-DSP Linux port?”, Linuxdevices, Nov. 05, 2003
[4] “Another native-DSP Linux port -- this one to ADI's Blackfin”, Linuxdevices, Nov. 06, 2003
[5] E. Drory, Or Sagi, “Symmetrical Hosting -- the MediaLinux Approach”, Linuxdevices, Nov.
11, 2003
[6] M. Hennerich, “uClinux as an Embedded OS on a DSP”, Linux Journal, July 2004
[7] HS Choi, HC Yun, “Context Switching and IPC Performance Comparison between
uClinux and Linux on the ARM9 based Processor”, Technical report, Samsung
Electronics, 2005
[8] VisualDSP++ 4.0 – Kernel (VDK) User’s Guide, Analog Devices, 2005
[9] Device Drivers and System Services Manual for Blackfin® Processors, Analog Devices,
2005