Robot Industriali
MT
I Robot
• Il termine robot deriva dal termine
ceco robota,
robota che significa "lavoro
lavoro
pesante" o "lavoro forzato".
L'introduzione
t odu o e di
d questo te
terminee ssi
deve allo scrittore ceco Karel Čapek,
il quale usò per la prima volta il
termine nel 1920 nel suo dramma
teatrale I robot universali di Rossum.
• Indica una qualsiasi macchina (di
forma più o meno antropomorfa), in
grado
d di svolgere
l
più
iù o meno
indipendentemente un lavoro al
posto dell'uomo
dell uomo.
MT
Robot industriali
• Applicazioni
pp
in ambienti pericolosi,
p
, nocivi o in cui
siano richieste particolari abilità (verniciatura)
• Elementi principali
–
–
–
–
corpo
braccio
Mano (e polso)
Armadio (telecomando)
MT
Corpo
p
MT
Armadio
MT
Mano e Polso
Mano
(end effector)
Polso
MT
Telecomando
MT
Elementi costituivi
• End-effector con torcia
per saldatura ad arco
• End-effector con siviera
MT
Elementi costitutivi
• End-effector con chiavi
pneumatiche
• End-effector con pistola
per saldatura a punti
MT
Elementi costitutivi
• Mano standard
• End-effector a dita
allineanti
MT
Elementi costitutivi
• End-effector per pezzi con
diverse dimensioni
• Mano speciale per tubi di
vetro
MT
Elementi costitutivi
• Mano autocentrante
• End-effector con camme
MT
Elementi costitutivi
• Mano di grande apertura
• Mano a camme con
ganasce interne ed esterne
MT
Gradi di libertà…
• Di un ppunto nello
spazio?
• Di un corpo
p nello
spazio?
.
MT
Gradi di libertà di un robot
MT
Tipo
p di ggiunti - Polare
• Giunto Polare ((detto anche
Rotazionale)
A 2 gradi di
libertà
A un grado di
libertà
MT
Tipo
p di ggiunti • Giunto Cartesiano ((detto anche Lineare))
MT
Geometria dei robot
• Cartesiano (CCC)
MT
Geometria dei robot
• Cilindrico (PCC)
MT
Geometria dei robot (2)
( )
• Sferico (o polare) (PPC)
• Articolato
MT
Geometria dei robot (3)
( )
Polso
• Articolato (PPP)
Corpo
• Questa figura rappresenta 6
giunti;
i ti il corpo ne ha
h 3,
3 il polso
l
altri 3.
MT
Geometria del robot SCARA
• Selective Compliance
p
Assemblyy Robotic Arm
MT
Precisione dei movimenti (1)
( )
• Risoluzione spaziale
p
– dipende dalla parola della CPU e dal campo di
movimento
• Accuratezza
MT
Precisione dei movimenti (2)
( )
• Ripetibilità
p
MT
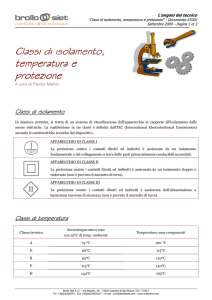
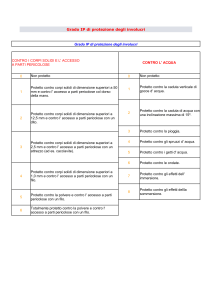
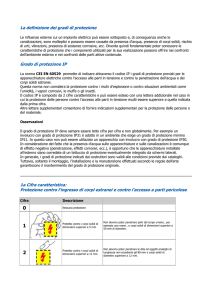
IP – International
Protection
1° CIFRA
protezione contro il
contatto di corpi solidi
esterni e contro l'accesso
a parti pericolose
protezione del
p
cifra
if
materiale
0
non protetto
protetto contro corpi
1
solidi di dimensioni
superiori a 50 mm.
protetto contro corpi
2
solidi di dimensioni
superiori
i i a 12 mm
protetto contro corpi
3
solidi di dimensioni
superiori a 2.5 mm
protetto contro corpi
4
solidi di dimensioni
superiori a 1 mm
protetto contro la
5
polvere
totalmente protetto
6
contro la polvere
1° cifra
2° cifra
lettera
aggiunta
0...1
0...8
A...D
lettera
supplem
entare
H...W
2° CIFRA
protezione contro la penetrazione dei liquidi
protezione del
cifra
materiale
0
non protetto
protezione delle
p
protetto contro la caduta
persone
1
verticale di gocce
.
d'acqua
protetto contro
protetto contro la caduta
p
ll'accesso
accesso con il dorso
2
di gocce d'acqua con
della mano
inclinazione max di 15°
protetto contro
protetto contro la
3
ll'accesso
accesso con un dito
pioggia
protetto contro gli
protetto contro
4
spruzzi d'acqua
l'accesso con un
protetto contro i getti
attrezzo
5
d'acqua
protetto contro
protetto contro le
6
l'accesso con un filo
ondate
protetto contro gli effetti
protetto contro
7
dell'immersione
l'accesso con un filo
protetto contro
protetto contro gli effetti
8
MT
l'accesso con un filo
della sommersione
IP – International
Protection
1° cifra
2° cifra
lettera
aggiunta
0...1
0...8
A...D
lettera
supplem
entare
H...W
lettera aggiunta
lettera
supplementare
l
(opzionale)
lett.
protezione del
materiale
H
apparecchiature
pp
ad alta
tensione
M
provato contro gli effetti
dannosi dovuti
all'ingresso
all
ingresso dell'acqua
dell acqua
con apparecchiatura in
moto
S
provato contro gli effetti
dannosi dovuti
all'ingresso dell'acqua
con apparecchiatura non
in moto
W
d
all'uso
ll'
in
i
adatto
condizioni atmosferiche
specificate
(opzionale) (a)
lett.
protezione delle persone
A
protetto contro l'accesso
con il dorso della mano
B
protetto contro l'accesso
con un dito
C
protetto contro l'accesso
con un attrezzo
D
protetto contro l'accesso
con un filo
MT
Altre caratteristiche tecniche
• Velocità di movimento
• Capacità di carico
• Tipo di azionamento
– idraulico
– elettrico
l tt i
– pneumatico
• Caratteristiche dipendenti dall’ambiente di lavoro
MT
Programmazione
g
del robot
• Per autoapprendimento
pp
– punto a punto
– a traiettoria controllata
• diretto
• con unità d’insegnamento
• per telecomando
• Linguaggio di programmazione
MT
Linguaggio
g gg di pprogrammazione
g
MT
Memorizzazione a traiettoria controllata
MT
Controllo del robot
• Necessità del controllo di cella
• Sensori
–
–
–
–
di visione
tattili
prossimità
vocali
MT
MT
Relazioni tra le tre coordinate del punto P nei due
sistemi di
d riferimento
f
MT
Espressione
p
in forma
f
matriciale
MT
Matrice di trasferimento
f
MT
Matrice inversa: dal sistema ffisso al sistema mobile
MT
Matrice di trasformazione per una rotazione attorno
ax
MT
Prodotto matriciale per le tre rotazioni: matrice
risultante
i lt t per le
l rotazioni
t i i
MT
Matrice di trasferimento
f
MT
E così via… MA…
• Pochi pprogettisti
g
((matrici e algoritmi
g
di
trasformazione)
• M
Molti
l i utilizzatori
ili
i (sapere
(
cosa guardare,
d
cosa
usare, leggere le caratteristiche tecniche)
MT
Applicazioni
pp
•
•
•
•
•
•
•
Pick and Place
Packaging
Montaggio
Fonderia
Saldatura
Lavorazione materiali “soffici” (legno)
( g )
Etc.
MT
Specifiche es. 1
Motoman UP400RN Robot
Specifications Axes: 6
Payload: 400 kg
V R h 4908 mm
V-Reach:
H-Reach: 3518 mm
Repeatability: ±0.5 mm
Structure: Vertical arcticulated type
Mounting: shelf
IP: 55
MT
Specifiche
p f
es. 2
ABB IRB 340SA R
Robot
b
Specifications Axes: 4
Payload: 1 kg
H-Reach: 1130 mm
IP: 67
MT